













")
")
Característica:
La altura entre dos chasis se puede cambiar por pilar de cobre.
Encoder de velocidad de 20 líneas.
Voltaje de trabajo: DC 3V / 5V / 6V.
Corriente de trabajo: 100ma / 100ma / 120ma.
Ni-carga (con rueda): 100RPM / 190RPM / 240RPM.
Velocidad (sin carga): 20m / min / 39m / min / 48m / min
Peso: 50g / 1.76oz.
Ruido: <65db.
Tamaño: 70 x 22 x 18 mm / 2,76 x 0,87 x 0,71 pulgadas.
Diámetro de la rueda: 66mm / 2.6in.
Peso del paquete: 480 G / 16.93 onzas.
Dimensiones del paquete (L * W * H): 255 * 150 * 35 MM / 10,04 * 5,91 * 1,38 pulgadas.
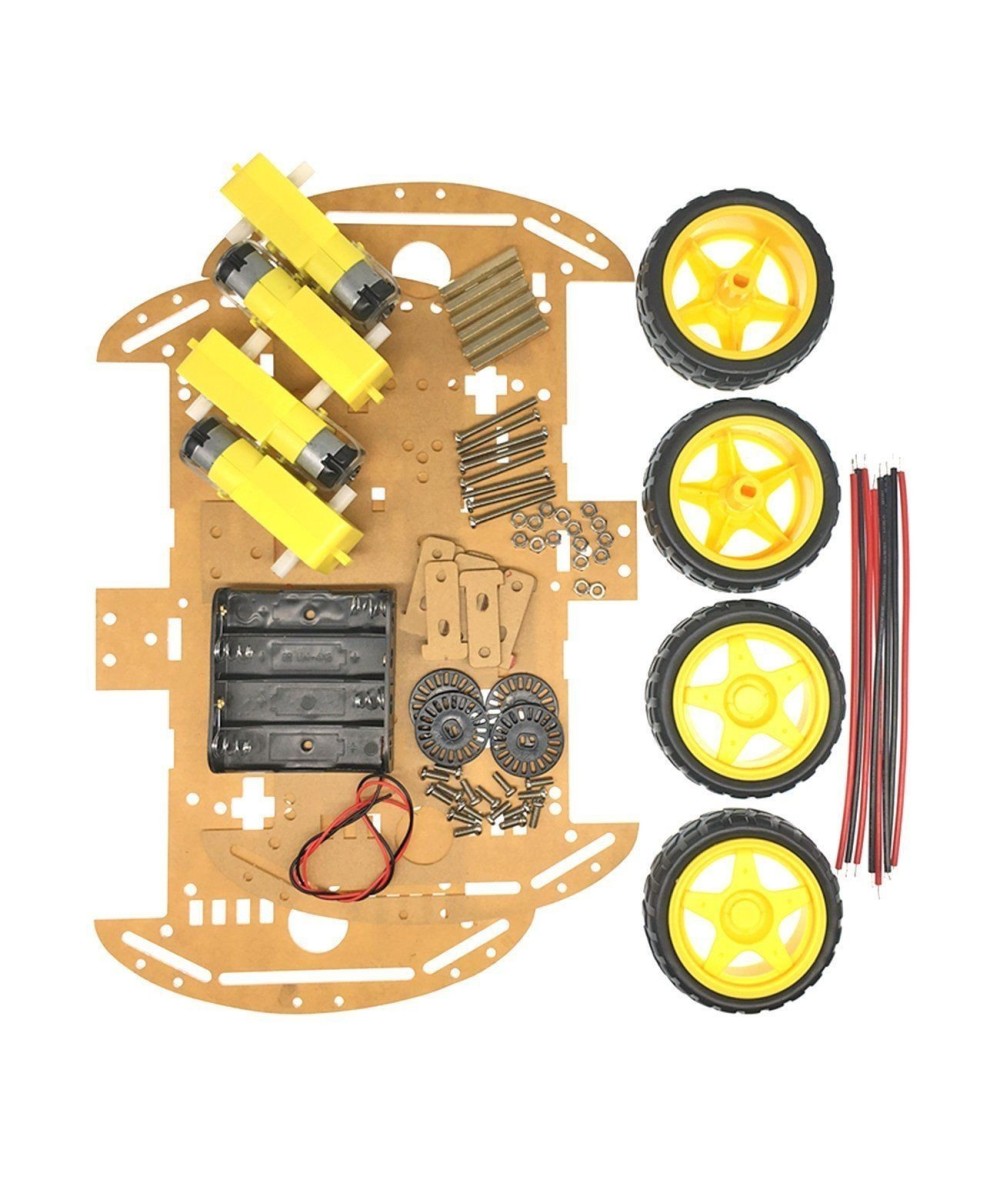
Incluye:
2 x chasis de coche inteligente (acrílico)
4 x motor de engranaje de CC (imán fuerte, prueba por EMC)
4 x neumático
8 x sujetador
1 juego de tornillo, tuerca y cobre Pilla
Proyecto Educativo Solar 6 en 1, cons distintos proyectos
Rueda para carrito robot 2x30mm (2u)
Módulo de reproducción de voz para reproductor de MP3, altavoz + juego de línea de datos, YX5200, para producción de MP3 DIY
Kit Inicial Mejorado para Proyectos de Electronica Compatible con Arduino con I2C
Proyecto de soldadura Consola de 51 juegos DIY
Kit de Altavoces en Forma de Balón de Fútbol DIY
Microscopio Digital USB de 5MP 300X (Android, Windows y MAC)
Proyecto Sistema de Control Automático de Acceso con Sensor Magnético
Kit de Ciencia Solar Híbrida STEM Proyecto bombeo de agua solar
Kit proyecto educativo Control de Acceso RFID 13.56 Mhz con Indicador y Pantalla (DIY)
Kit de carrito seguidor de linea 3V
Indicador de voltaje en batería LM3914 DIY (led rojo)
Prisma triangular para analizar el espectro de la luz 10cm
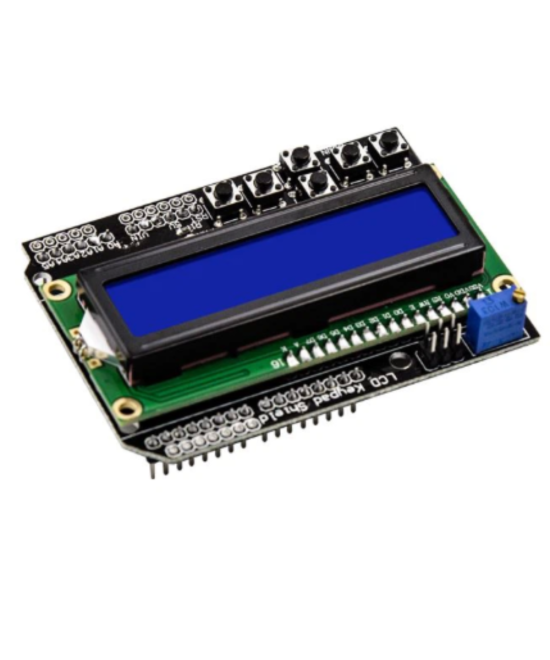
Pantalla LCD 1602 I2C con teclado
Diodos de señal de conmutación rápida 1N4148
Kit de cables puente para placa de pruebas 140/560 PCS
Interruptor pequeño tipo barco 250VAC / 3A Para Arduino.
Controlador de motor L293D, L293
Rele de 1 Canal, 2 Canales, 4 Canales y 8 Canales de 10A 5V compatible con microcontrolador arduino
Este detector permite saber si una puerta o ventana esta abierto o cerrado.
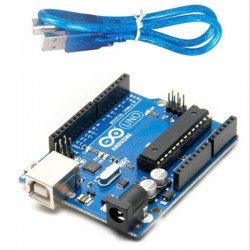
Arduino Uno es la tarjeta de desarrollo más popular compatible con Arduino, basado en el microcontrolador ATmega328, ideal para iniciarse en el mundo de los microcontroladores.
Carrito de acrílico para proyectos con arduino, incluye motor y 4 ruedas.