Descripción:
30A Controlador de velocidad Brushless ESC MultiCopter KK Multi-Copter Quad X-flying
Compatible con: 400-450 helicópteros / Aviones o Quad-Rotor Multi RC Heli
Especificaciónes
1.1 Salida: Continuo 30A, limite 40A hasta 10 Secs.
1.2 Voltaje de entrada: batería de litio de 2-3 células o batería de NiCd / NIMh de 5-8 células.
1.3 BEC: 2A / 5V (modo lineal).
1.4 Velocidad máxima: 210.000 rpm para 2 polos BLM, 70.000 rpm para 6 polos BLM, 35.000 rpm para 12 polos BLM.
BLM: Motor sin escobillas
1.5 Tamaño: 45mm L x 24m m W x 10m m H.
1.6 Peso: 25g.
Características:
2.1 Función de armado de seguridad: Independientemente de la posición del stick del acelerador, el motor no girará después de que la batería esté conectada.
2.2 Calibración del acelerador: El rango de aceleración se puede configurar para proporcionar la mejor linealidad del acelerador, totalmente compatible con todos los transmisores disponibles en el mercado.
2.3 Elementos programables:
Ajuste del freno: freno activado / freno desactivado.
Tipo de batería: Li-xx Li-ion o LiPo / Ni-xx NiMh o NiCd.
Modo de protección de baja tensión (modo de corte): Reducir gradualmente la potencia de salida / cortar la potencia de salida.
Umbral de protección de corte de baja tensión umbral de corte: bajo / medio / alto.
Modo de inicio: normal / suave / muy suave.
Tiempo: bajo / medio / alto.
Restablecer: restablece todos los elementos programables a sus valores predeterminados.
2.4 Protección completa Características: Protección de corte de bajo voltaje / protección contra sobrecalentamiento / señal de aceleración perdida de protección.
Contenido:
1 x Controlador de velocidad para drone 30A
Protector del protector de la hélice del apoyo de 5 pulgadas para QAV250 QAV210 RC Quadcopter Motors
Antena SMA/RP-SMA 5.8GHz Omnidireccional para Drone (2U)
ejes de fibra de carbono qav250 Mini Fpv quadricóptero Multirotor Frame Kit Desarmado
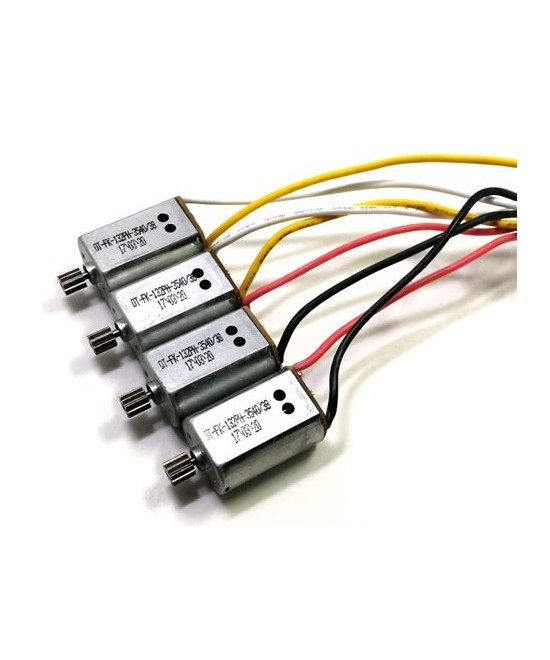
Motores de repuesto para drones Syma X8G / X8C / X8W / X8HG
La batería LiPo (Lithium Polymer) de 7.4V 2200mAh 50C 2S es una solución de alto rendimiento y confiabilidad para dispositivos de radiocontrol (RC) como drones, autos, barcos y aviones RC.
control remoto para drone u otro equipo DIY 2.4Ghz
Control remoto para drone 8 canales HT-8A
hélice qav250 accesorios de avión drone
4050 propulsor CW CCW Apoyos para Mini Quadcopter Drone QAV180 QAV210 QAV250
DYS 5045 (X50453) hélices de nylon de tres aspas CW / CCW Aplicación FPV QAV210 Drone
Placa Controlador de Vuelo para Drone SP Pro Racing F3 CleanFlight
Batería tipo LiPo 11.1V 60C 5000mAh 55.5Wh 3S1P AWANFI
Control Remoto para Drone Flysky FUSI FS-i6
Motores de repuesto para drones Syma X8G / X8C / X8W / X8HG
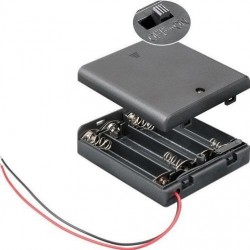
Contenedor de 4 baterias AA cerrado con interruptor ON/OFF color negro
Conector de Cable PCT 3 pines - 5 pines (4 Unidades)
Conector paralelo tipo T ,adaptador doble y splitter para baterías
Manguera Flexible 1/4 x 5/16 pulgadas - 1 Metro
Tarot MT2206Ⅱ 1900KV Motor sin escobillas para Mini QAV250 QAV280 Robocat 270 Drone
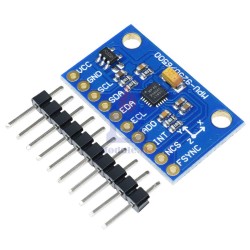
Sensor giroscopio, acelerómetro y magnetómetro 6 ejes I2C MPU6500 GY-6500
CellMeter-7 Comprobador Digital de Capacidad de Batería
controlador de velocidad de motor para drone