Caracteristicas:
Las piezas deben ensamblarse directamente
Parámetros de la hélice
Longitud: 138 mm
Apertura: ajuste apretado de 1 mm
Parámetros del motor: diámetro 7 mm * longitud 16 mm (diámetro del eje 1 mm)
Voltaje nominal: 3,7 V
Velocidad aerodinámica 45.000 rpm
Peso por juego: 5 g
Contenido:
1 x motor sin núcleo
1 x hélice
1 x juego de grupo de desaceleración
17HS4401S-PG518 motor paso a paso de caja de cambios planetaria para impresora 3D, pieza CNC Relación de engranajes 5.18: 1
Controlador de motor lineal 2 fases
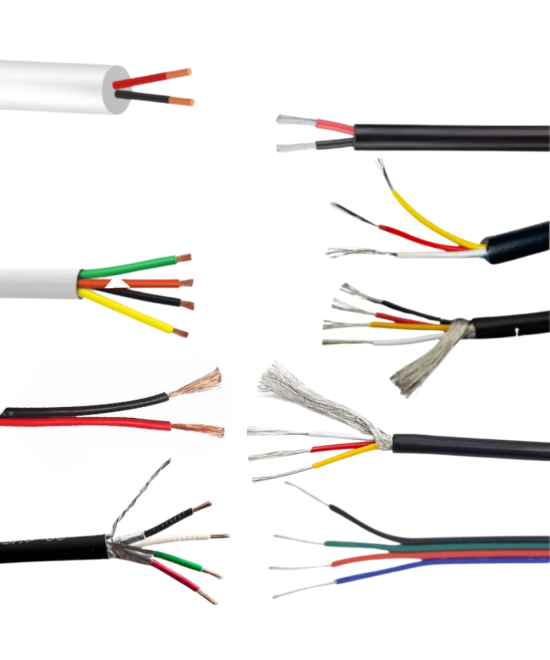
Manguera Flexible 1/16 x 1/4 - 1 Metro
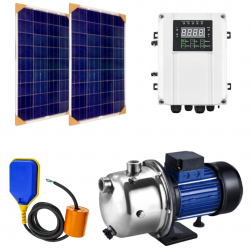
Kit de sistema de Bomba solar Sumergible para aguas residuales 110V 1100W 2''
Motorreductor un eje metálico para carrito robot 3-6V
Riel Deslizante con Mini Motor Paso a Paso 2 Fases
HM2204U 2300KV Motor sin Escobillas CW & CCW para FPV 250 Cuadricóptero Mini QAV250
Controlador AC 4SDM2-28 220V 1500W
control de velocidad de motor spindle 15-160 VDC - 12-110V AC 300W
Valvula Electromagnetica Solenoide para Control de Flujo PGV-100 1" PVC 24VDC NO
Válvula Electromagnética Solenoide de Plástico 1/2" 12V NC / NO
Escoger un tipo:
Mini Motor 130 DC 3-6V con Pinzas Cocodrilo para proyectos de electónica.
Kit de sistema de Bomba solar superficial centrifuga con controlador 750W
Serie E Nema 34 Motor paso a paso Bipolar 1.8deg 12.0 Nm (1699.68oz.in) 6.0A 86x86x151.5mm 4 cables
Batería Samsung recargable 18650 3.7V 2500mAh 20A
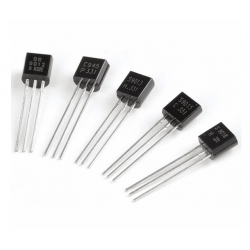
Bipolar Transistores de señal A-92 NPN PN
Paquete de 5 Transistores 1 valor
Cargador de baterias XTAR MC1
Batería 903052 3.7V para drone 1800MaH con cargador USB
Interruptor push button 12mm PBS-33B
PWM Controlador de Velocidad de Motor DC 6V/12V/24V/28V 2A
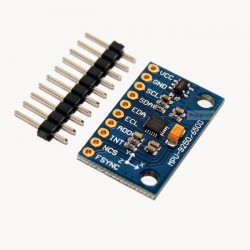
GY-86 10DOF MS5611 HMC5883L MPU6050 Control de vuelo módulo de Sensor
Motor de avión con engranaje y aspa